※本セミナはZoomを使ったオンライン同時開催セミナです.
オンライン受講を希望される場合は,セミナ申込後,メールでご連絡ください.
詳細は,オンライン同時開催セミナについてに記載されていますので,必ずお読みください. 「ミリ波レーダはとにかく分かりにくい」という嘆きをよく聞きます.本屋に行けばいくつか教科書が売られていますが,やたら数式を並べて物理的イメージが沸きにくい解説や,廃れた古い技術の解説が多く,講師自身も入門者時代に大変苦労しました.本セミナでは,この経験を踏まえ,レーダ初学者が最初の大きな壁を乗り越えられるよう支援することを目指します.
第1部は入門編であり,数式をほぼ使わず,ビデオや動くプログラムを使ってできるだけビジュアル的・直感的に,1次元~2次元のレーダの基本原理を説明します.その延長で,現在車載レーダに次いで市場が大きい,バイタルセンサの原理も説明する.本セミナでは,この部分にできるだけ時間を割き,ゆっくりと進める予定です.
第2部は中級編であり,実務をスタートする上でどうしても初級編では足りなくなる知識を補足します.電波法,FFTの性質,MIMOレーダ,速度の測定原理,等.本セミナでは,ここまでの終了を目標とします.
(もし時間が残れば)第3部は上級編であり,毎回少数おられるプロの参加者のために車載レーダの最新技術・トレンドを説明します.現在ではハードウェア技術者よりもソフトウェア(数学)技術者が求められている現状.無線通信とレーダの境界が消えつつある現状.高速移動時のMIMOレーダの欠点と,それを補うための位相補償技術やDoppler Division MIMO技術. ミリ波レーダとLiDARの様々な違い.その他を解説します.
●対象聴講者
・これからミリ波レーダを始めたいが,何から勉強して良いか分からない,
と壁を感じている初学者の方
・毎回少数ながら既にプロとして活躍されている参加者もおられるので,
最後にプロ向けのアドバンストな話題も提供する
●講演の目標
・ミリ波レーダの基本原理を,なるべく数式を使わず,ビジュアル的・直感的に把握する
・入門編・中級編・上級編と分けたため,自分の知りたいレベルの知識に集中できる
・アプリとしては,現在最も需要が高い2大アプリ「1次元バイタルセンサ」
「2次元イメージングレーダ」については,信号処理プログラムの概略を知る
・ミリ波レーダの世界で起きている様々な変化(最新技術等)を知る
●内容
1. 講師所属の国プロ「DIVP」の紹介
2. 入門編
2.1 空中を飛ぶ電波のイメージを掴もう
2.2 FMCW系の全ての基本であるドップラーレーダと,その応用であるバイタルセンサ
2.3 ドップラーレーダと双対関係にある,測距レーダ
2.4 2次元イメージングレーダは,1次元測距レーダを複数束ねたもの
2.5 車の世界では,高画質なLiDARと,耐環境性が良いミリ波レーダが競合関係
3. 中級編
3.1 電波法
3.2 知っておくべき最低限のFFTの性質
3.3 大半のFMCWレーダは,実は至近距離(~0m)の測定が難しい
3.4 方位推定の原理の補足説明
3.5 MIMOレーダ
3.6 速度の測定原理
4. 上級編(もし時間が残れば)
4.1 LiDARには見えにくく,ミリ波レーダなら見える,身の周りの意外なもの
4.2 2017年のCMOSワンチップ化以降は,競争領域はハードウェアからソフトウェア(数学)へ
4.3 更に未来の自動運転車では,AIボードやセンサネットワークとの親和性が競争領域.
4.4 年々増加するアンテナ本数と,高分解能化,およびMIMOレーダの弱点
4.5 MIMOレーダの弱点を,デジタル変調で補う技術
4.6 MIMOレーダの弱点を,アナログ変調のまま補う技術
(位相補償、Doppler Division MIMO)
4.7 現在のアナログ変調(FMCW)レーダは,電波干渉やゴースト発生が不可避な,
実は未熟な技術
4.8 「地図作成」における競争領域
4.9 カーボンニュートラルとミリ波レーダの未来
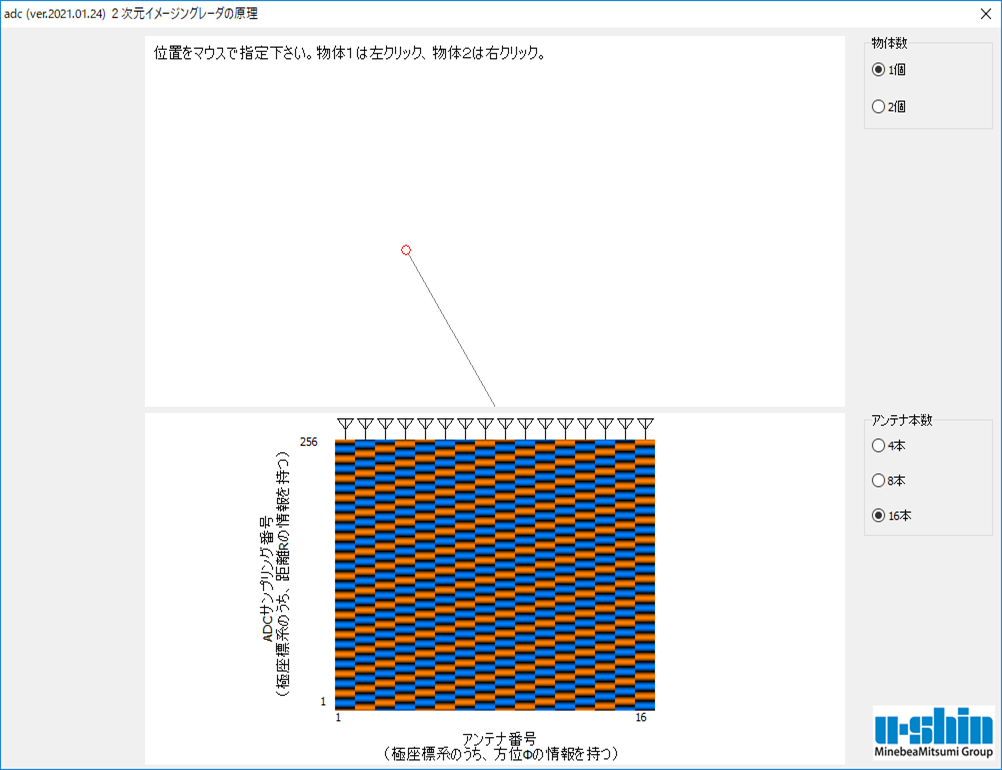 前半(入門者向け)の例.仮想レーダモジュールで信号処理を体験
前半(入門者向け)の例.仮想レーダモジュールで信号処理を体験
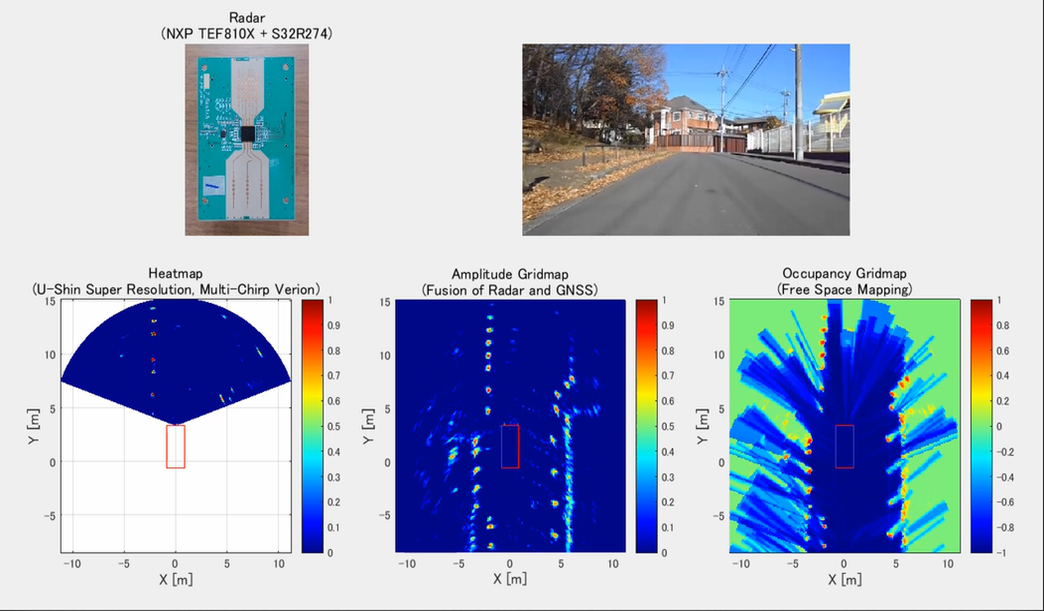 後半(プロ向け)の例.自動運転向けFree Space Mapping.
後半(プロ向け)の例.自動運転向けFree Space Mapping.