※本セミナはZoomを使ったオンライン同時開催セミナです.
オンライン受講を希望される場合は,セミナ申込後,メールでご連絡ください.
詳細は,オンライン同時開催セミナについてに記載されていますので,必ずお読みください. 「ミリ波レーダはとにかく分かりにくい」という嘆きをよく聞きます.本屋にはいくつか教科書が売られてますが,やたら数式を並べて物理的イメージがわかない開設や,既に使われない古い技術の解説が多く,講師自身も入門者時代に大変苦労しました.本セミナはこの体験を踏まえ,レーダ入門者が最初の大きな壁を越えられるようお手伝いを目指したものです.
ミリ波レーダには,以下の2大市場があります.
①車載レーダを代表とする,イメージングレーダ
②幼児置き去りセンサを代表とする,バイタル(=生体信号)センサ
市場規模は①が圧倒的に大きく,技術的難易度も①が圧倒的です.原理については,あまり知られてませんが,実は②が①を学ぶための基礎に近いという関係です.講師自身も過去に,まず②から入門して①へ進みました.
このような背景から,本セミナは下記の構成にしました.①も②も説明しますが,②が①の基礎であること,CQセミナでは電機業界の参加者が多いことを踏まえ,②の比重を大きくしたことが特徴です.
・まず,②の原理・物理的イメージを,ほとんど数式を使わず,アニメーションを多用してビジュアル的に掴んで頂く.製品開発のうえでの注意点も説明する.
・その理解に基づいて,次に①の初級レベルの知識を,アニメーションや動かせる体験プログラムを多用して掴んで頂く.
・①は初級レベルだけでは実務には足りないので,当日皆様と相談しながら残った時間で,中級レベルを説明する.更には上級レベルの世界の一端も紹介する.
●対象聴講者
・これからミリ波レーダを始めたいが,何から勉強して良いか分からない,
と壁を感じている初学者の方.
・ただし,毎回少数ながら既にプロとして活躍されている参加者もおられるので,
最後にプロ向けのアドバンストな話題も提供.
●講演の目標
・ミリ波レーダの原理を,なるべく数式を使わず,体験的・ビジュアル的・直感的に把握できる.
・2大市場の車載レーダとバイタルセンサに分けて,更に車載レーダについては
初級・中級・上級に分けて,整理して知識が得られる.
・入門者を優先しつつも,プロの上級の受講者にも配慮して,先端情報も紹介する.
●内容
1. 導入
1.1 ミリ波レーダの2大市場
1.2 他センサと比べた,ミリ波レーダの特徴
1.3 ミリ波レーダの2大方式
1.4 電波法
2. バイタルセンサ
2.1 「位相」という非日常的な概念に慣れよう
2.2 FMCW系の全ての基本であるドップラーレーダ
2.3 ドップラーレーダの代表的なアプリが,スピードガンとバイタルセンサ
2.4 バイタルセンサの原理と,様々な注意
3. イメージングレーダ(初級)
3.1 車載の3大センサにおける,レーダが置かれた状況
3.2 ここで言う初級とは? 静止状態なら,高速移動状態より簡単.
3.3 (空間的な)1次元レーダ~3次元レーダの関係
3.4 全ての基礎である1次元の測距レーダは,実はドップラーレーダとほぼ同じ原理.
3.5 2次元イメージングレーダの直感的な原理と,体験プログラム
4. イメージングレーダ(中級)
4.1 イメージングレーダ信号処理は,「デジタル信号処理」の一種
4.2 中級以上では,FFTアルゴリズムの知識も必要
4.3 チャープ設計ができるようになれば,レーダ技術者として一人前
4.4 ほぼ全ての市販レーダチップが搭載する機能「MIMO」
4.5 現在の車載レーダの速度測定原理は,実はスピードガンとほぼ同じ
4.6 ゴースト問題や電波干渉問題
5. イメージングレーダ(上級)
※時間が余れば,たくさんある話題の中で下記3つをピックアップして紹介
5.1 講師所属の国プロ「DIVP」の紹介.ミリ波レーダは試作しなくても済む時代へ?
5.2 AIボードとの共存を前提に,迫られつつある変化
5.3 「MIMO」はメリットばかりじゃなく,デメリットもあまりにも大きい技術
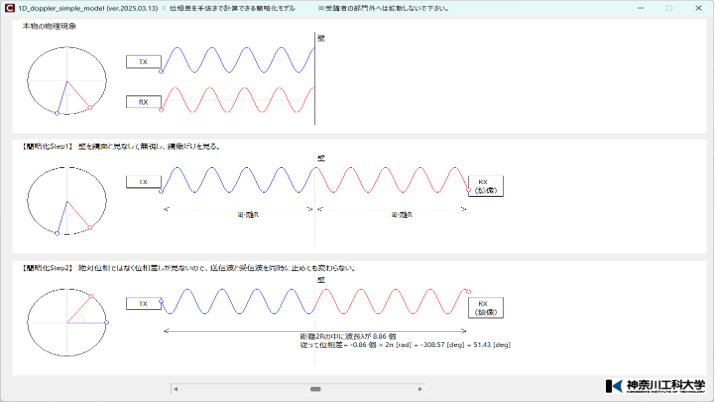 位相差を手抜きで計算できる簡略化モデル
位相差を手抜きで計算できる簡略化モデル
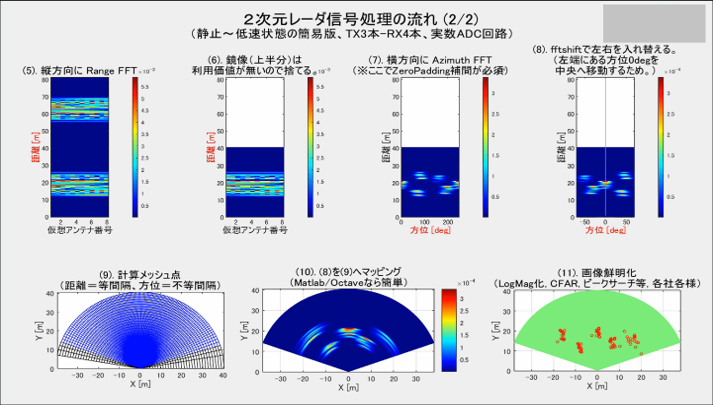 2次元レーダ信号処理の流れ
2次元レーダ信号処理の流れ