※本セミナはZoomを使ったオンライン限定セミナです.
詳細は,オンライン限定セミナについてをお読みください.
自己位置推定とは,与えられた地図上における対象とする移動物体の相対位置を求める問題である.この位置を求めるということが,ロボットや自動車の自動走行を実現するにあたり,極めて重要な要素技術となる.
本講演ではまず,自己位置推定とはどの様な技術であり,なぜ自動走行において重要なのかといった基礎的な背景を解説する.次に,自己位置推定,および関連するSimultaneous Localization and Mapping(SLAM)技術がどのように発展してきたかを整理することで,自己位置推定に関連する背景を解説する.
また,自己位置推定はセンサの観測値と地図を照合することで実行される問題であるが,その実装では確率モデリングが行われる.本講演では,この確率モデリングの基礎を踏まえながら,パーティクルフィルタ(粒子フィルタ)のような実践的な方法がどのように実装されるかといった,自己位置推定に関する基礎的な知識の解説も行う.
そしてこれらを基に,講演者が執筆した「LiDARを用いた高度自己位置推定システム」(コロナ社)において述べている,自己位置推定高性能化のための方法について解説する.
●対象聴講者
・ロボットや自動車の自動走行に興味がある方
・自己位置推定に関する知識を深めたい方
・確率モデリングに興味のある方
●講演の目標
・自己位置推定の背景などを含めた基礎的な知識を習得する
(なぜ自動走行に必要か,なぜ難しいか,どのように発展したか,など)
・パーティクルフィルタによる自己位置推定が自身で実装できる,
かつそれに関する数学的知識を身に付ける
・現状の問題を把握し,先端研究がどのような問題を解決しようとしているかを理解する
●内容
1 なぜ自動運転に自己位置推定が重要なのか
1.1 自己位置推定とは
1.2 環境コンテクストの理解と自己位置推定
2 自己位置推定(とSLAM)の発展と機械学習を用いた最新手法
2.1 自己位置推定・SLAMとは
2.2 従来法発展の流れ
2.3 最近の手法の紹介
3 自己位置推定の定式化
3.1 確率の復習・および自己位置推定問題の確率的定式化
3.2 グラフィカルモデル
3.3 ベイズフィルタとの対応
4 観測モデル(自己位置推定における困難な点)
4.1 観測モデルとは
4.2 代表的な観測モデル(ビーム・尤度場モデル)
4.3 観測の独立性がもたらす利点と欠点
5 パーティクルフィルタに基づく自己位置推定(モンテカルロ位置推定:MCL)
5.1 最適化ベースと確率ベースの位置推定の違い
5.2 モンテカルロ位置推定における工夫
6 環境変化に頑健な自己位置推定
6.1 自己位置推定はなぜ環境変化に脆弱か
6.2 環境変化を明示的に考慮する観測モデル
7 信頼度付き自己位置推定
7.1 通常の自己位置推定の問題点
7.2 自己位置推定における信頼度
7.3 機械学習の活用による自己位置推定の信頼度の推定
8 観測値と地図の間に生じるミスマッチの認識
8.1 ミスマッチを認識することの困難さ
8.2 観測全体の関係性を考慮するための確率モデル
9 深層学習を用いた自己位置推定とMCLの融合
9.1 深層学習を用いたEnd-to-End自己位置推定の利点と欠点
9.2 パーティクルの尤度はどう決まるか(重点サンプリング)
9.3 End-to-End自己位置推定の欠点を克服する融合方法
10 まとめ
●参考文献
・赤井 直紀 著,
LiDARを用いた高度自己位置推定システム,コロナ社.
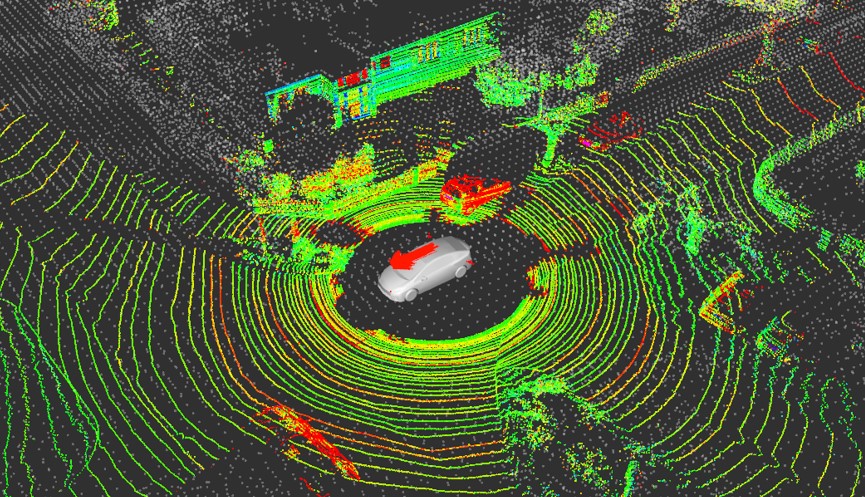 位置推定のイメージ画像
位置推定のイメージ画像