
●〆切迫る!動画をチェック
画像を"クリック"すると動画が見られます!

【開催日】2026年6月4日(木)
★手ぶらでOK!実習・知って必ず得する!Armアセンブリ言語「超」入門
https://seminar.cqpub.co.jp/ccm/ES26-0022
【開催日】2026年6月7日(日)
★手ぶらでOK!実習・1日でわかる!「実用」マイコンCプログラムの作り方~ビギナ応援企画【後閑 講師設計のオリジナル教材基板付き】
https://seminar.cqpub.co.jp/ccm/ES26-0023

【開催日】2026年6月9日(火)
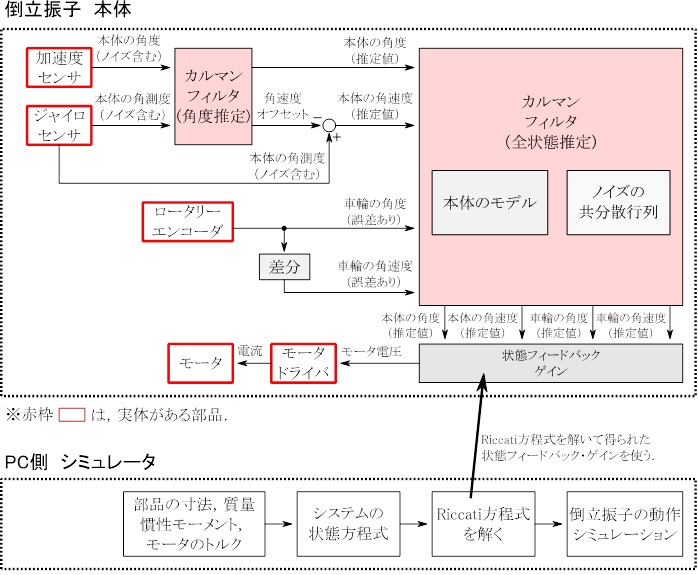
★実習・MATLABでシミュレーション入門
https://seminar.cqpub.co.jp/ccm/ES26-0026

【開催日】2026年6月11日(木)
★実習・基礎から理解するディジタル・フィルタ入門
https://seminar.cqpub.co.jp/ccm/ES26-0027

【開催日】2026年6月12日(金)
★実習・マイコンを動かしながら学ぶディジタル・フィルタ【実装プリント基板&マイコン・ボード付き】
https://seminar.cqpub.co.jp/ccm/ES26-0028

【開催日】2026年6月16日(火) ~ 17日(水)
★実習・アナログ・フィルタ回路設計 基礎の基礎 [アナログ基本回路入門シリーズ1]
https://seminar.cqpub.co.jp/ccm/ES26-0029

【開催日】2026年6月19日(金)
★Anomalibをつかった外観検査異常検知入門
https://seminar.cqpub.co.jp/ccm/ES26-0031