「統計処理による高精度自動制御 カルマン・フィルタ入門」[講師による実験実演付き]
「統計処理による高精度自動制御 カルマン・フィルタ入門」[講師による実験実演付き]
|
|
【開催日】2020年2月11日(火) ~ 2020年2月12日(水) 10:00-17:00 2日コース
【セミナNo.】ES19-0147 【受講料】40,000円(税込)
【会場】東京・巣鴨 CQ出版社セミナ・ルーム [地図]
【セミナNo.】ES19-0147 【受講料】40,000円(税込)
【会場】東京・巣鴨 CQ出版社セミナ・ルーム [地図]
本セミナの主題は「カルマン・フィルタ」である.カルマン・フィルタは,自動運転をはじめとする高精度自動制御のためのキー・テクノロジである.
本セミナでは「倒立振子ロボット」を題材として,カルマン・フィルタの理論および実装方法を解説する.カルマン・フィルタの理論は「現代制御理論」と「確率・統計」の上に成り立っている.「現代制御理論」は複雑なロボット・システムの制御に適用できる,汎用性に富むものである.また,「確率・統計」はいわゆる人工知能技術の核心となる理論である.
本セミナではこれらの理論を基礎から解説する.本質を理解することで,カルマン・フィルタにとどまらず多岐に渡る応用力を身に着けることができる.
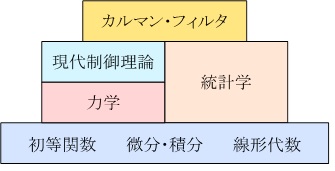
本セミナで解説する理論の構造.「カルマン・フィルタ」の理解を目指して全項目を解説する.
本セミナでは「倒立振子ロボット」を題材として,カルマン・フィルタの理論および実装方法を解説する.カルマン・フィルタの理論は「現代制御理論」と「確率・統計」の上に成り立っている.「現代制御理論」は複雑なロボット・システムの制御に適用できる,汎用性に富むものである.また,「確率・統計」はいわゆる人工知能技術の核心となる理論である.
本セミナではこれらの理論を基礎から解説する.本質を理解することで,カルマン・フィルタにとどまらず多岐に渡る応用力を身に着けることができる.
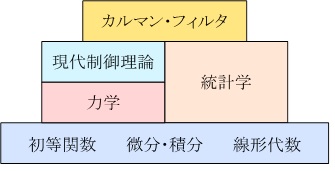
本セミナで解説する理論の構造.「カルマン・フィルタ」の理解を目指して全項目を解説する.
【1日目】
1. イントロダクション
1.1 宇宙船,自動運転,人工知能,通信技術の共通点
1.2 カルマン・フィルタ理論の概説
1.3 倒立振子ロボットの紹介
1.4 全体の流れの説明
2. 数学
2.1 数学の必要性
2.2 初等関数
2.3 微分・積分
2.4 線形代数
3. 力学
3.1 ニュートンの運動方程式
3.2 オイラーの回転運動方程式
3.3 ラグランジュの運動方程式
3.4 倒立振子ロボットのモデル化
【2日目】
4. 現代制御理論
4.1 状態方程式
4.2 可制御性・可観測性
4.3 安定性
4.4 状態フィードバック
4.5 最適制御
5. 確率・統計
5.1 記述統計
5.2 確率論の基礎
5.3 確率変数と確率分布
5.4 正規分布
6. カルマン・フィルタ
6.1 最大事後確率推定
6.2 カルマン・フィルタのアルゴリズム導出
6.3 カルマン・フィルタの実装
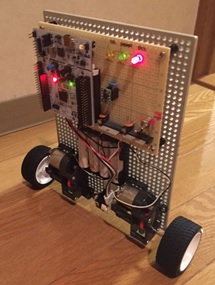
題材として使用する「倒立振子ロボット」.(実演のみで,参加者による製作は行いません)
1. イントロダクション
1.1 宇宙船,自動運転,人工知能,通信技術の共通点
1.2 カルマン・フィルタ理論の概説
1.3 倒立振子ロボットの紹介
1.4 全体の流れの説明
2. 数学
2.1 数学の必要性
2.2 初等関数
2.3 微分・積分
2.4 線形代数
3. 力学
3.1 ニュートンの運動方程式
3.2 オイラーの回転運動方程式
3.3 ラグランジュの運動方程式
3.4 倒立振子ロボットのモデル化
【2日目】
4. 現代制御理論
4.1 状態方程式
4.2 可制御性・可観測性
4.3 安定性
4.4 状態フィードバック
4.5 最適制御
5. 確率・統計
5.1 記述統計
5.2 確率論の基礎
5.3 確率変数と確率分布
5.4 正規分布
6. カルマン・フィルタ
6.1 最大事後確率推定
6.2 カルマン・フィルタのアルゴリズム導出
6.3 カルマン・フィルタの実装
題材として使用する「倒立振子ロボット」.(実演のみで,参加者による製作は行いません)
【受講者が持参するもの】
不要
不要
【講師】
別府 伸耕 氏〔リニア・テック 代表〕
2011年 東京工業大学 電気電子工学科 卒業 2013年 東京工業大学 電子物理工学専攻 修了 2013年 株式会社アドバンテスト 入社 2016年 株式会社村田製作所 入社 2019年 リニア・テック 開業 大学院在籍時にMOSFETの研究でIEEE EDS Japan Student Award 受賞. 電機メーカにて高周波アナログIC設計,ディジタル信号処理に携わる. RFアナログ回路設計が専門.
別府 伸耕 氏〔リニア・テック 代表〕
2011年 東京工業大学 電気電子工学科 卒業 2013年 東京工業大学 電子物理工学専攻 修了 2013年 株式会社アドバンテスト 入社 2016年 株式会社村田製作所 入社 2019年 リニア・テック 開業 大学院在籍時にMOSFETの研究でIEEE EDS Japan Student Award 受賞. 電機メーカにて高周波アナログIC設計,ディジタル信号処理に携わる. RFアナログ回路設計が専門.